add some code
This commit is contained in:
@@ -0,0 +1 @@
|
||||
a63de81f60adddd5204ed8f286754f1186f16a2fc0f2119152a9d36771f9526a
|
||||
@@ -0,0 +1,11 @@
|
||||
# ChangeLog
|
||||
|
||||
## v0.2.0 - 2025-6-18
|
||||
|
||||
* Add software estimation for charging state
|
||||
|
||||
## v0.1.0 - 2025-5-16
|
||||
|
||||
### Enhancements:
|
||||
|
||||
* Initial version.
|
||||
@@ -0,0 +1 @@
|
||||
{"version": "1.0", "algorithm": "sha256", "created_at": "2025-06-24T07:40:07.783598+00:00", "files": [{"path": "CHANGELOG.md", "size": 143, "hash": "c8b1038487312d410d1f9363329d5cbe18823b538c48728dde6c9352f7986486"}, {"path": "CMakeLists.txt", "size": 229, "hash": "90b188d14748bfeca1cc06a4e159e562a5ffc85717a80c1215c5c0063aa9bb60"}, {"path": "Kconfig", "size": 2974, "hash": "40c4ce2f50aec846ec7b504b8bd1bd734f1798e8994fcd35148d946650487b74"}, {"path": "README.md", "size": 3032, "hash": "c0eacbeeec963c3877860275921cbf8b328d5701873fe505e50af0013cc35812"}, {"path": "adc_battery_estimation.c", "size": 14241, "hash": "c09da57c7c724c380c0d39d119c388dad167f3e23b096807ed0bc99d9e62ec46"}, {"path": "idf_component.yml", "size": 507, "hash": "27afdbe4cd867007a393f58183f36d15716d98e65dc90acce4277843be3fcff8"}, {"path": "license.txt", "size": 11358, "hash": "cfc7749b96f63bd31c3c42b5c471bf756814053e847c10f3eb003417bc523d30"}, {"path": "include/adc_battery_estimation.h", "size": 4815, "hash": "e065748c2e9855fed413b3c6066f8cdc5e46a01f9637c910431bc15329448066"}, {"path": "test_apps/CMakeLists.txt", "size": 325, "hash": "65c63239ad8fff50ed27b99f880f2dc644bb32d69083e5323f71fc8f265ee262"}, {"path": "test_apps/sdkconfig.defaults", "size": 87, "hash": "4f240cc3912dcec12cf9d272853b0db2dcf9d5c0b24079440a0a264c68146210"}, {"path": "test_apps/main/CMakeLists.txt", "size": 139, "hash": "e9bb083d59b8c0bd8f33f707da6885cbd22c29d5ab72d4f2164d11f5b4a98fcc"}, {"path": "test_apps/main/adc_battery_estimation_test.c", "size": 6209, "hash": "195fa85998658f06b50aeaa45115a249388d4af64cd03d88081727e5a758209e"}, {"path": "test_apps/main/idf_component.yml", "size": 125, "hash": "3bb27c70bb2a5117938050d4ac83a740bfcb11359b8229b1acd775ccdce41def"}]}
|
||||
@@ -0,0 +1,6 @@
|
||||
idf_component_register(SRCS "adc_battery_estimation.c"
|
||||
INCLUDE_DIRS include
|
||||
REQUIRES "esp_adc" "esp_timer")
|
||||
|
||||
include(package_manager)
|
||||
cu_pkg_define_version(${CMAKE_CURRENT_LIST_DIR})
|
||||
72
managed_components/espressif__adc_battery_estimation/Kconfig
Normal file
72
managed_components/espressif__adc_battery_estimation/Kconfig
Normal file
@@ -0,0 +1,72 @@
|
||||
menu "ADC Battery Estimation"
|
||||
|
||||
choice OCV_SOC_MODEL
|
||||
bool "Select default OCV and battery capacity model"
|
||||
default OCV_SOC_MODEL_1
|
||||
help
|
||||
Select Model
|
||||
|
||||
config OCV_SOC_MODEL_1
|
||||
bool "OCV_SOC Model 1"
|
||||
help
|
||||
This model is based on TI's document: Battery Fuel Gauging Algorithm Comparison
|
||||
You can find the document here: https://www.ti.com/lit/SLUAAR3
|
||||
|
||||
config OCV_SOC_MODEL_2
|
||||
bool "OCV_OSC Model 2"
|
||||
help
|
||||
This model is based on Analog Devices' document:
|
||||
"Characterizing a Lithium-Ion (Li+) Cell for Use with an Open-Circuit-Voltage (OCV) Based Fuel Gauge"
|
||||
You can find the document at:
|
||||
https://www.analog.com/en/resources/design-notes/characterizing-a-lithiumion-li-cell-for-use-with-an-opencircuitvoltage-ocv-based-fuel-gauge.html
|
||||
endchoice
|
||||
|
||||
config ADC_FILTER_WINDOW_SIZE
|
||||
int "ADC Filter Window size"
|
||||
range 5 15
|
||||
default 10
|
||||
help
|
||||
The number of ADC measurements to take before filtering the battery voltage, the
|
||||
higher the value the more stable the battery voltage will be, but will take longer
|
||||
to update
|
||||
|
||||
config BATTERY_CAPACITY_LPF_COEFFICIENT
|
||||
int "Battery Capacity LPF Coefficient (/10)"
|
||||
range 1 10
|
||||
default 2
|
||||
help
|
||||
First-order low-pass filter coefficient for battery capacity calculation.
|
||||
The value is divided by 10 to get the actual coefficient (e.g., 2 means 0.2).
|
||||
Lower values provide more smoothing but slower response to changes.
|
||||
Higher values provide less smoothing but faster response to changes.
|
||||
|
||||
config BATTERY_STATE_SOFTWARE_ESTIMATION
|
||||
bool "Battery State Software Estimation"
|
||||
default y
|
||||
help
|
||||
Enable software-based estimation of the battery state to determine
|
||||
whether the battery is charging or discharging.
|
||||
|
||||
menu "Software Estimation Configuration"
|
||||
depends on BATTERY_STATE_SOFTWARE_ESTIMATION
|
||||
|
||||
config SOFTWARE_ESTIMATION_SAMPLE_COUNT
|
||||
int "Software Estimation Sample Count"
|
||||
range 10 15
|
||||
default 10
|
||||
help
|
||||
The number of samples to collect for software-based battery state estimation.
|
||||
A higher number of samples can provide more accurate estimation but may increase
|
||||
the time required for estimation.
|
||||
|
||||
config SOFTWARE_ESTIMATION_SAMPLE_INTERVAL
|
||||
int "Software Estimation Sample Interval (ms)"
|
||||
range 10000 100000
|
||||
default 20000
|
||||
help
|
||||
The interval in milliseconds between each sample for software-based battery state estimation.
|
||||
A shorter interval allows for quicker detection of changes in battery state but may consume
|
||||
more power.
|
||||
endmenu
|
||||
|
||||
endmenu
|
||||
@@ -0,0 +1,65 @@
|
||||
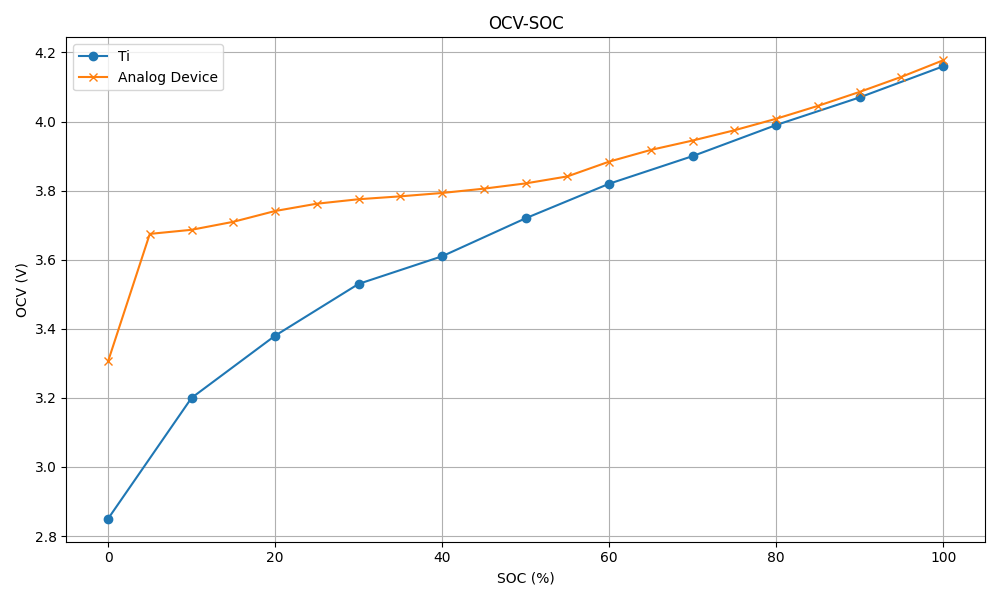
## Battery capacity estimation based on ADC
|
||||
|
||||
`adc_battery_estimation` is a lithium battery capacity estimation component based on ADC, which converts battery voltage data collected by ADC into corresponding battery capacity according to the OCV-SOC model, and ensures the consistency of battery capacity data in both discharge and charge states. This component has the following features:
|
||||
|
||||
1. Provides basic battery level information while ensuring consistency in the estimated capacity
|
||||
2. Supports both user-provided external ADC Handle or automatic creation by the component internally
|
||||
3. Supports filtering of collected ADC data and estimated battery capacity
|
||||
4. Provides a software-based charging state estimation method. If the user cannot provide a charging indicator pin and `BATTERY_STATE_SOFTWARE_ESTIMATION` is enabled in Kconfig, software charging state estimation will be activated
|
||||
|
||||
This component provides two OCV-SOC models, from [Ti](https://www.ti.com/lit/SLUAAR3) and [Analog Device](https://www.analog.com/en/resources/design-notes/characterizing-a-lithiumion-li-cell-for-use-with-an-opencircuitvoltage-ocv-based-fuel-gauge.html) respectively. Additionally, it supports user-defined custom OCV-SOC models.
|
||||
|
||||
|
||||
|
||||
## Add component to your project
|
||||
|
||||
Please use the component manager command `add-dependency` to add the `adc_battery_estimation` to your project's dependency, during the `CMake` step the component will be downloaded automatically
|
||||
|
||||
```
|
||||
idf.py add-dependency "espressif/adc_battery_estimation=*"
|
||||
```
|
||||
|
||||
Alternatively, you can create `idf_component.yml`. More is in [Espressif's documentation](https://docs.espressif.com/projects/esp-idf/en/latest/esp32/api-guides/tools/idf-component-manager.html).
|
||||
|
||||
## Example use
|
||||
|
||||
```c
|
||||
#include <stdio.h>
|
||||
#include <string.h>
|
||||
#include "freertos/FreeRTOS.h"
|
||||
#include "freertos/task.h"
|
||||
#include "adc_battery_estimation.h"
|
||||
|
||||
#define TEST_ADC_UNIT (ADC_UNIT_1)
|
||||
#define TEST_ADC_BITWIDTH (ADC_BITWIDTH_DEFAULT)
|
||||
#define TEST_ADC_ATTEN (ADC_ATTEN_DB_12)
|
||||
#define TEST_ADC_CHANNEL (ADC_CHANNEL_1)
|
||||
#define TEST_RESISTOR_UPPER (460)
|
||||
#define TEST_RESISTOR_LOWER (460)
|
||||
#define TEST_ESTIMATION_TIME (50)
|
||||
|
||||
void app_main(void)
|
||||
{
|
||||
adc_battery_estimation_t config = {
|
||||
.internal = {
|
||||
.adc_unit = TEST_ADC_UNIT,
|
||||
.adc_bitwidth = TEST_ADC_BITWIDTH,
|
||||
.adc_atten = TEST_ADC_ATTEN,
|
||||
},
|
||||
.adc_channel = TEST_ADC_CHANNEL,
|
||||
.lower_resistor = TEST_RESISTOR_LOWER,
|
||||
.upper_resistor = TEST_RESISTOR_UPPER,
|
||||
};
|
||||
|
||||
adc_battery_estimation_handle_t adc_battery_estimation_handle = adc_battery_estimation_create(&config);
|
||||
|
||||
for (int i = 0; i < TEST_ESTIMATION_TIME; i++) {
|
||||
float capacity = 0;
|
||||
adc_battery_estimation_get_capacity(adc_battery_estimation_handle, &capacity);
|
||||
printf("Battery capacity: %.1f%%\n", capacity);
|
||||
vTaskDelay(pdMS_TO_TICKS(500));
|
||||
}
|
||||
|
||||
adc_battery_estimation_destroy(adc_battery_estimation_handle);
|
||||
}
|
||||
```
|
||||
@@ -0,0 +1,341 @@
|
||||
/*
|
||||
* SPDX-FileCopyrightText: 2025 Espressif Systems (Shanghai) CO LTD
|
||||
*
|
||||
* SPDX-License-Identifier: Apache-2.0
|
||||
*/
|
||||
#include <stdio.h>
|
||||
#include <string.h>
|
||||
#include <math.h>
|
||||
#include "esp_log.h"
|
||||
#include "esp_check.h"
|
||||
#include "esp_timer.h"
|
||||
#include "adc_battery_estimation.h"
|
||||
|
||||
static const char* TAG = "adc_battery_estimation";
|
||||
|
||||
typedef struct {
|
||||
adc_oneshot_unit_handle_t adc_handle;
|
||||
adc_cali_handle_t adc_cali_handle;
|
||||
adc_channel_t adc_channel;
|
||||
adc_unit_t adc_unit;
|
||||
bool is_adc_handle_owned;
|
||||
const battery_point_t *battery_points;
|
||||
size_t battery_points_count;
|
||||
adc_battery_charging_detect_cb_t charging_detect_cb;
|
||||
void *charging_detect_user_data;
|
||||
float last_capacity; /*!< Last calculated battery capacity in percentage */
|
||||
bool is_first_read; /*!< Flag for first capacity reading */
|
||||
bool last_charging_state; /*!< Last charging state */
|
||||
float voltage_divider_ratio; /*!< Voltage divider ratio */
|
||||
float filter_alpha; /*!< Low-pass filter coefficient (0 < alpha < 1) */
|
||||
#if CONFIG_BATTERY_STATE_SOFTWARE_ESTIMATION
|
||||
uint64_t last_time_ms; /*!< Last time in milliseconds */
|
||||
int battery_state_estimation_buffer[CONFIG_SOFTWARE_ESTIMATION_SAMPLE_COUNT]; /*!< Buffer to store ADC readings */
|
||||
int battery_state_estimation_index; /*!< Current index in the buffer */
|
||||
#endif
|
||||
} adc_battery_estimation_ctx_t;
|
||||
|
||||
// Helper function to calculate battery capacity based on voltage
|
||||
static float calculate_battery_capacity(float voltage, const battery_point_t *points, size_t points_count)
|
||||
{
|
||||
// Find the two points that bracket the current voltage
|
||||
size_t i;
|
||||
for (i = 0; i < points_count - 1; i++) {
|
||||
if (voltage >= points[i + 1].voltage && voltage <= points[i].voltage) {
|
||||
// Linear interpolation between the two points
|
||||
float voltage_range = points[i].voltage - points[i + 1].voltage;
|
||||
float capacity_range = points[i].capacity - points[i + 1].capacity;
|
||||
float voltage_offset = voltage - points[i + 1].voltage;
|
||||
|
||||
return points[i + 1].capacity + (voltage_offset * capacity_range / voltage_range);
|
||||
}
|
||||
}
|
||||
|
||||
// If voltage is outside the range, clamp to the nearest point
|
||||
if (voltage > points[0].voltage) {
|
||||
return points[0].capacity;
|
||||
} else {
|
||||
return points[points_count - 1].capacity;
|
||||
}
|
||||
}
|
||||
|
||||
// Helper function to analyze battery trend
|
||||
static bool analyze_battery_trend(const int *buffer, int buffer_size, bool last_charging_state)
|
||||
{
|
||||
int increasing_count = 0;
|
||||
int decreasing_count = 0;
|
||||
|
||||
// Count increasing and decreasing points
|
||||
for (int i = 1; i < buffer_size; i++) {
|
||||
if (buffer[i] > buffer[i - 1]) {
|
||||
increasing_count++;
|
||||
} else if (buffer[i] < buffer[i - 1]) {
|
||||
decreasing_count++;
|
||||
}
|
||||
}
|
||||
|
||||
// Log the analysis results
|
||||
ESP_LOGD(TAG, "Trend analysis: increasing=%d, decreasing=%d", increasing_count, decreasing_count);
|
||||
|
||||
// If increasing and decreasing counts are equal, keep the last state
|
||||
if (increasing_count == decreasing_count) {
|
||||
return last_charging_state;
|
||||
}
|
||||
// Otherwise, determine by increasing/decreasing trend
|
||||
return increasing_count > decreasing_count;
|
||||
}
|
||||
|
||||
adc_battery_estimation_handle_t adc_battery_estimation_create(adc_battery_estimation_t *config)
|
||||
{
|
||||
ESP_RETURN_ON_FALSE(config, NULL, TAG, "Config is NULL");
|
||||
|
||||
adc_battery_estimation_ctx_t *ctx = (adc_battery_estimation_ctx_t *) calloc(1, sizeof(adc_battery_estimation_ctx_t));
|
||||
ESP_RETURN_ON_FALSE(ctx, NULL, TAG, "Failed to allocate memory for context");
|
||||
|
||||
ctx->adc_channel = config->adc_channel;
|
||||
ctx->charging_detect_cb = config->charging_detect_cb;
|
||||
ctx->charging_detect_user_data = config->charging_detect_user_data;
|
||||
ctx->is_first_read = true;
|
||||
|
||||
// Use default battery points if not provided
|
||||
if (config->battery_points == NULL || config->battery_points_count == 0) {
|
||||
ctx->battery_points = default_battery_points;
|
||||
ctx->battery_points_count = DEFAULT_POINTS_COUNT;
|
||||
} else {
|
||||
ctx->battery_points = config->battery_points;
|
||||
ctx->battery_points_count = config->battery_points_count;
|
||||
}
|
||||
|
||||
// Use external ADC handle if provided
|
||||
if (config->external.adc_handle != NULL && config->external.adc_cali_handle != NULL) {
|
||||
ctx->adc_handle = config->external.adc_handle;
|
||||
ctx->adc_cali_handle = config->external.adc_cali_handle;
|
||||
ctx->is_adc_handle_owned = false;
|
||||
} else {
|
||||
// Create new ADC unit and channel
|
||||
adc_oneshot_unit_init_cfg_t init_cfg = {
|
||||
.unit_id = config->internal.adc_unit,
|
||||
};
|
||||
ESP_RETURN_ON_FALSE(adc_oneshot_new_unit(&init_cfg, &ctx->adc_handle) == ESP_OK, NULL, TAG, "Failed to create ADC unit");
|
||||
|
||||
adc_oneshot_chan_cfg_t chan_cfg = {
|
||||
.atten = config->internal.adc_atten,
|
||||
.bitwidth = config->internal.adc_bitwidth,
|
||||
};
|
||||
ESP_RETURN_ON_FALSE(adc_oneshot_config_channel(ctx->adc_handle, ctx->adc_channel, &chan_cfg) == ESP_OK, NULL, TAG, "Failed to configure ADC channel");
|
||||
|
||||
#if ADC_CALI_SCHEME_CURVE_FITTING_SUPPORTED
|
||||
adc_cali_curve_fitting_config_t cali_config = {
|
||||
.unit_id = config->internal.adc_unit,
|
||||
.chan = config->adc_channel,
|
||||
.atten = config->internal.adc_atten,
|
||||
.bitwidth = config->internal.adc_bitwidth,
|
||||
};
|
||||
ESP_RETURN_ON_FALSE(adc_cali_create_scheme_curve_fitting(&cali_config, &ctx->adc_cali_handle) == ESP_OK, NULL, TAG, "Failed to create ADC calibration scheme");
|
||||
#elif ADC_CALI_SCHEME_LINE_FITTING_SUPPORTED
|
||||
adc_cali_line_fitting_config_t cali_config = {
|
||||
.unit_id = config->internal.adc_unit,
|
||||
.atten = config->internal.adc_atten,
|
||||
.bitwidth = config->internal.adc_bitwidth,
|
||||
};
|
||||
ESP_RETURN_ON_FALSE(adc_cali_create_scheme_line_fitting(&cali_config, &ctx->adc_cali_handle) == ESP_OK, NULL, TAG, "Failed to create ADC calibration scheme");
|
||||
#endif
|
||||
ctx->is_adc_handle_owned = true;
|
||||
}
|
||||
|
||||
// Validate voltage divider resistors
|
||||
if (config->upper_resistor <= 0.0f || config->lower_resistor <= 0.0f) {
|
||||
ESP_LOGE(TAG, "Invalid resistor values: upper_resistor=%.2f, lower_resistor=%.2f",
|
||||
config->upper_resistor, config->lower_resistor);
|
||||
return NULL;
|
||||
}
|
||||
|
||||
float total_resistance = config->upper_resistor + config->lower_resistor;
|
||||
if (total_resistance <= 0.0f) {
|
||||
ESP_LOGE(TAG, "Total resistance is zero or negative: %.2f", total_resistance);
|
||||
return NULL;
|
||||
}
|
||||
|
||||
ctx->voltage_divider_ratio = config->lower_resistor / total_resistance;
|
||||
ctx->filter_alpha = CONFIG_BATTERY_CAPACITY_LPF_COEFFICIENT / 10.0f;
|
||||
|
||||
#if CONFIG_BATTERY_STATE_SOFTWARE_ESTIMATION
|
||||
ctx->battery_state_estimation_index = 0;
|
||||
ctx->last_time_ms = 0;
|
||||
#endif
|
||||
|
||||
return (adc_battery_estimation_handle_t) ctx;
|
||||
}
|
||||
|
||||
esp_err_t adc_battery_estimation_destroy(adc_battery_estimation_handle_t handle)
|
||||
{
|
||||
esp_err_t ret = ESP_OK;
|
||||
if (handle == NULL) {
|
||||
return ESP_OK;
|
||||
}
|
||||
|
||||
adc_battery_estimation_ctx_t *ctx = (adc_battery_estimation_ctx_t *) handle;
|
||||
if (ctx->is_adc_handle_owned) {
|
||||
printf("delete internal adc unit\n");
|
||||
// Delete ADC unit and calibration scheme if owned
|
||||
ret = adc_oneshot_del_unit(ctx->adc_handle);
|
||||
if (ret != ESP_OK) {
|
||||
ESP_LOGE(TAG, "Failed to delete ADC unit: %s", esp_err_to_name(ret));
|
||||
return ret;
|
||||
}
|
||||
|
||||
#if ADC_CALI_SCHEME_CURVE_FITTING_SUPPORTED
|
||||
ret = adc_cali_delete_scheme_curve_fitting(ctx->adc_cali_handle);
|
||||
if (ret != ESP_OK) {
|
||||
ESP_LOGE(TAG, "Failed to delete ADC calibration scheme: %s", esp_err_to_name(ret));
|
||||
return ret;
|
||||
}
|
||||
#elif ADC_CALI_SCHEME_LINE_FITTING_SUPPORTED
|
||||
ret = adc_cali_delete_scheme_line_fitting(ctx->adc_cali_handle);
|
||||
if (ret != ESP_OK) {
|
||||
ESP_LOGE(TAG, "Failed to delete ADC calibration scheme: %s", esp_err_to_name(ret));
|
||||
return ret;
|
||||
}
|
||||
#endif
|
||||
}
|
||||
free(ctx);
|
||||
return ESP_OK;
|
||||
}
|
||||
|
||||
esp_err_t adc_battery_estimation_get_capacity(adc_battery_estimation_handle_t handle, float *capacity)
|
||||
{
|
||||
esp_err_t ret = ESP_OK;
|
||||
ESP_RETURN_ON_FALSE(handle && capacity, ESP_ERR_INVALID_ARG, TAG, "Invalid arguments");
|
||||
|
||||
adc_battery_estimation_ctx_t *ctx = (adc_battery_estimation_ctx_t *) handle;
|
||||
bool is_charging = false;
|
||||
#if CONFIG_BATTERY_STATE_SOFTWARE_ESTIMATION
|
||||
uint64_t current_time_ms = esp_timer_get_time() / 1000;
|
||||
#endif
|
||||
// Check charging state if callback is provided
|
||||
if (ctx->charging_detect_cb) {
|
||||
is_charging = ctx->charging_detect_cb(ctx->charging_detect_user_data);
|
||||
}
|
||||
#if CONFIG_BATTERY_STATE_SOFTWARE_ESTIMATION
|
||||
else {
|
||||
// Use last charging state if no callback is provided
|
||||
is_charging = ctx->last_charging_state;
|
||||
}
|
||||
#endif
|
||||
|
||||
// Get ADC reading via filtering
|
||||
int vol[CONFIG_ADC_FILTER_WINDOW_SIZE] = {0};
|
||||
int avg = 0, std_vol = 0, filtered_vol = 0, filtered_result = 0, filtered_count = 0;
|
||||
for (int i = 0; i < CONFIG_ADC_FILTER_WINDOW_SIZE; i++) {
|
||||
int adc_raw = 0;
|
||||
ret = adc_oneshot_read(ctx->adc_handle, ctx->adc_channel, &adc_raw);
|
||||
if (ret != ESP_OK) {
|
||||
ESP_LOGE(TAG, "Failed to read ADC: %s", esp_err_to_name(ret));
|
||||
return ret;
|
||||
}
|
||||
|
||||
ret = adc_cali_raw_to_voltage(ctx->adc_cali_handle, adc_raw, &vol[i]);
|
||||
if (ret != ESP_OK) {
|
||||
ESP_LOGE(TAG, "Failed to convert ADC raw to voltage: %s", esp_err_to_name(ret));
|
||||
return ret;
|
||||
}
|
||||
avg += vol[i];
|
||||
}
|
||||
avg /= CONFIG_ADC_FILTER_WINDOW_SIZE;
|
||||
filtered_result = avg;
|
||||
|
||||
for (int i = 0; i < CONFIG_ADC_FILTER_WINDOW_SIZE; i++) {
|
||||
std_vol += (vol[i] - avg) * (vol[i] - avg);
|
||||
}
|
||||
std_vol = (int)sqrt(std_vol / (CONFIG_ADC_FILTER_WINDOW_SIZE));
|
||||
|
||||
for (int i = 0; i < CONFIG_ADC_FILTER_WINDOW_SIZE; i++) {
|
||||
if (abs(vol[i] - avg) < std_vol) {
|
||||
filtered_vol += vol[i];
|
||||
filtered_count++;
|
||||
}
|
||||
}
|
||||
|
||||
if (filtered_count > 0) {
|
||||
filtered_result = filtered_vol / filtered_count;
|
||||
}
|
||||
|
||||
#if CONFIG_BATTERY_STATE_SOFTWARE_ESTIMATION
|
||||
// Record filtered_result every CONFIG_SOFTWARE_ESTIMATION_SAMPLE_INTERVAL ms
|
||||
if (current_time_ms - ctx->last_time_ms >= CONFIG_SOFTWARE_ESTIMATION_SAMPLE_INTERVAL) {
|
||||
// Store the new value at current index
|
||||
ctx->battery_state_estimation_buffer[ctx->battery_state_estimation_index] = filtered_result;
|
||||
// Update index, wrap around when reaching the end
|
||||
ctx->battery_state_estimation_index = (ctx->battery_state_estimation_index + 1) % CONFIG_SOFTWARE_ESTIMATION_SAMPLE_COUNT;
|
||||
|
||||
// If buffer is full (index is 0), analyze the trend
|
||||
if (ctx->battery_state_estimation_index == 0) {
|
||||
bool trend_is_charging = analyze_battery_trend(ctx->battery_state_estimation_buffer,
|
||||
CONFIG_SOFTWARE_ESTIMATION_SAMPLE_COUNT,
|
||||
ctx->last_charging_state);
|
||||
ESP_LOGD(TAG, "Battery trend analysis: %s", trend_is_charging ? "Charging" : "Discharging");
|
||||
|
||||
// Update last charging state
|
||||
ctx->last_charging_state = trend_is_charging;
|
||||
// If no charging detection callback is provided, use trend analysis
|
||||
if (!ctx->charging_detect_cb) {
|
||||
is_charging = trend_is_charging;
|
||||
}
|
||||
}
|
||||
ctx->last_time_ms = current_time_ms;
|
||||
}
|
||||
#endif
|
||||
// Convert ADC voltage (mV) to battery voltage (V)
|
||||
float battery_voltage = (float)filtered_result / 1000.0f / ctx->voltage_divider_ratio;
|
||||
|
||||
// Calculate battery capacity based on voltage
|
||||
float current_capacity = calculate_battery_capacity(battery_voltage, ctx->battery_points, ctx->battery_points_count);
|
||||
|
||||
// Apply low-pass filter and handle capacity monotonicity
|
||||
if (!ctx->is_first_read) {
|
||||
// Apply low-pass filter
|
||||
float filtered_capacity = ctx->filter_alpha * current_capacity + (1.0f - ctx->filter_alpha) * ctx->last_capacity;
|
||||
|
||||
if (is_charging) {
|
||||
// In charging state, capacity should not decrease
|
||||
if (filtered_capacity < ctx->last_capacity) {
|
||||
ESP_LOGD(TAG, "Capacity decreased in charging state (%.1f%% -> %.1f%%), keeping previous value",
|
||||
ctx->last_capacity, filtered_capacity);
|
||||
filtered_capacity = ctx->last_capacity;
|
||||
}
|
||||
} else {
|
||||
// In discharging state, capacity should not increase
|
||||
if (filtered_capacity > ctx->last_capacity) {
|
||||
ESP_LOGD(TAG, "Capacity increased in discharging state (%.1f%% -> %.1f%%), keeping previous value",
|
||||
ctx->last_capacity, filtered_capacity);
|
||||
filtered_capacity = ctx->last_capacity;
|
||||
}
|
||||
}
|
||||
current_capacity = filtered_capacity;
|
||||
} else {
|
||||
// First reading, just store it
|
||||
ctx->is_first_read = false;
|
||||
}
|
||||
|
||||
// Update last capacity and charging state
|
||||
ctx->last_capacity = current_capacity;
|
||||
ctx->last_charging_state = is_charging;
|
||||
*capacity = current_capacity;
|
||||
|
||||
ESP_LOGD(TAG, "Battery capacity: %.1f%%", *capacity);
|
||||
return ESP_OK;
|
||||
}
|
||||
|
||||
esp_err_t adc_battery_estimation_get_charging_state(adc_battery_estimation_handle_t handle, bool *is_charging)
|
||||
{
|
||||
ESP_RETURN_ON_FALSE(handle && is_charging, ESP_ERR_INVALID_ARG, TAG, "Invalid arguments");
|
||||
|
||||
adc_battery_estimation_ctx_t *ctx = (adc_battery_estimation_ctx_t *) handle;
|
||||
if (ctx->charging_detect_cb) {
|
||||
*is_charging = ctx->charging_detect_cb(ctx->charging_detect_user_data);
|
||||
} else {
|
||||
*is_charging = ctx->last_charging_state;
|
||||
}
|
||||
|
||||
return ESP_OK;
|
||||
}
|
||||
@@ -0,0 +1,11 @@
|
||||
dependencies:
|
||||
cmake_utilities: '*'
|
||||
idf: '>=5.0'
|
||||
description: Battery capacity estimation based on ADC
|
||||
issues: https://github.com/espressif/esp-iot-solution/issues
|
||||
repository: git://github.com/espressif/esp-iot-solution.git
|
||||
repository_info:
|
||||
commit_sha: e74bab6049d8506ce3194a7b440f9d72d83e4ad0
|
||||
path: components/sensors/battery_fuel_gauge/adc_battery_estimation
|
||||
url: https://github.com/espressif/esp-iot-solution/tree/master/components/sensors/battery_fuel_gauge/adc_battery_estimation
|
||||
version: 0.2.0
|
||||
@@ -0,0 +1,132 @@
|
||||
/*
|
||||
* SPDX-FileCopyrightText: 2025 Espressif Systems (Shanghai) CO LTD
|
||||
*
|
||||
* SPDX-License-Identifier: Apache-2.0
|
||||
*/
|
||||
#pragma once
|
||||
|
||||
#ifdef __cplusplus
|
||||
extern "C" {
|
||||
#endif
|
||||
|
||||
#include "esp_adc/adc_oneshot.h"
|
||||
#include "esp_adc/adc_cali.h"
|
||||
#include "esp_adc/adc_cali_scheme.h"
|
||||
|
||||
typedef struct {
|
||||
float voltage; /*!< Battery voltage in volts */
|
||||
int capacity; /*!< Battery capacity in percentage (0-100) */
|
||||
} battery_point_t;
|
||||
|
||||
// Charging state detection callback function type
|
||||
typedef bool (*adc_battery_charging_detect_cb_t)(void *user_data);
|
||||
|
||||
typedef struct {
|
||||
union {
|
||||
struct {
|
||||
adc_oneshot_unit_handle_t adc_handle; /*!< External ADC handle */
|
||||
adc_cali_handle_t adc_cali_handle; /*!< External ADC calibration handle */
|
||||
} external; /*!< Use external handles */
|
||||
struct {
|
||||
adc_unit_t adc_unit; /*!< ADC unit number */
|
||||
adc_bitwidth_t adc_bitwidth; /*!< ADC bit width */
|
||||
adc_atten_t adc_atten; /*!< ADC attenuation */
|
||||
} internal; /*!< Create new ADC configuration */
|
||||
}; /*!< Use external or internal handles */
|
||||
adc_channel_t adc_channel; /*!< ADC channel number */
|
||||
|
||||
// Resistor configuration
|
||||
float upper_resistor; /*!< Upper resistor value in ohms */
|
||||
float lower_resistor; /*!< Lower resistor value in ohms */
|
||||
|
||||
// Battery voltage-capacity mapping configuration
|
||||
const battery_point_t *battery_points; /*!< Array of voltage-capacity mapping points, NULL for default */
|
||||
size_t battery_points_count; /*!< Number of points in the array, 0 for default */
|
||||
|
||||
// Charging state detection configuration
|
||||
adc_battery_charging_detect_cb_t charging_detect_cb; /*!< Callback function to detect charging state */
|
||||
void *charging_detect_user_data; /*!< User data passed to the callback function */
|
||||
} adc_battery_estimation_t;
|
||||
|
||||
typedef void *adc_battery_estimation_handle_t;
|
||||
|
||||
// Default battery voltage-capacity mapping points
|
||||
#if CONFIG_OCV_SOC_MODEL_1
|
||||
#define DEFAULT_POINTS_COUNT 11
|
||||
static const battery_point_t default_battery_points[DEFAULT_POINTS_COUNT] = {
|
||||
{4.16, 100},
|
||||
{4.07, 90},
|
||||
{3.99, 80},
|
||||
{3.90, 70},
|
||||
{3.82, 60},
|
||||
{3.72, 50},
|
||||
{3.61, 40},
|
||||
{3.53, 30},
|
||||
{3.38, 20},
|
||||
{3.20, 10},
|
||||
{2.85, 0},
|
||||
};
|
||||
#elif CONFIG_OCV_SOC_MODEL_2
|
||||
#define DEFAULT_POINTS_COUNT 21
|
||||
static const battery_point_t default_battery_points[DEFAULT_POINTS_COUNT] = {
|
||||
{4.177454, 100},
|
||||
{4.129486, 95},
|
||||
{4.085934, 90},
|
||||
{4.045427, 85},
|
||||
{4.008118, 80},
|
||||
{3.974769, 75},
|
||||
{3.945074, 70},
|
||||
{3.917968, 65},
|
||||
{3.884009, 60},
|
||||
{3.841219, 55},
|
||||
{3.820965, 50},
|
||||
{3.805737, 45},
|
||||
{3.79325, 40},
|
||||
{3.783504, 35},
|
||||
{3.775129, 30},
|
||||
{3.762185, 25},
|
||||
{3.741018, 20},
|
||||
{3.7098, 15},
|
||||
{3.686654, 10},
|
||||
{3.674776, 5},
|
||||
{3.305545, 0},
|
||||
};
|
||||
#endif
|
||||
|
||||
/**
|
||||
* @brief Create a new ADC battery estimation handle
|
||||
*
|
||||
* @param config Pointer to the ADC battery estimation configuration
|
||||
* @return adc_battery_estimation_handle_t Return the ADC battery estimation handle if created successfully, NULL if failed
|
||||
*/
|
||||
adc_battery_estimation_handle_t adc_battery_estimation_create(adc_battery_estimation_t *config);
|
||||
|
||||
/**
|
||||
* @brief Destroy the ADC battery estimation handle
|
||||
*
|
||||
* @param handle Pointer to the ADC battery estimation handle
|
||||
* @return esp_err_t Return ESP_OK if destroyed successfully, ESP_ERR_INVALID_ARG if invalid argument, ESP_FAIL if failed
|
||||
*/
|
||||
esp_err_t adc_battery_estimation_destroy(adc_battery_estimation_handle_t handle);
|
||||
|
||||
/**
|
||||
* @brief Get the battery capacity in percentage
|
||||
*
|
||||
* @param handle Pointer to the ADC battery estimation handle
|
||||
* @param capacity Pointer to the battery capacity in percentage
|
||||
* @return esp_err_t Return ESP_OK if get capacity successfully, ESP_ERR_INVALID_ARG if invalid argument, ESP_FAIL if failed
|
||||
*/
|
||||
esp_err_t adc_battery_estimation_get_capacity(adc_battery_estimation_handle_t handle, float *capacity);
|
||||
|
||||
/**
|
||||
* @brief Get the battery charging state
|
||||
*
|
||||
* @param handle Pointer to the ADC battery estimation handle
|
||||
* @param is_charging Pointer to the battery charging state
|
||||
* @return esp_err_t Return ESP_OK if get charging state successfully, ESP_ERR_INVALID_ARG if invalid argument, ESP_FAIL if failed
|
||||
*/
|
||||
esp_err_t adc_battery_estimation_get_charging_state(adc_battery_estimation_handle_t handle, bool *is_charging);
|
||||
|
||||
#ifdef __cplusplus
|
||||
}
|
||||
#endif
|
||||
202
managed_components/espressif__adc_battery_estimation/license.txt
Normal file
202
managed_components/espressif__adc_battery_estimation/license.txt
Normal file
@@ -0,0 +1,202 @@
|
||||
|
||||
Apache License
|
||||
Version 2.0, January 2004
|
||||
http://www.apache.org/licenses/
|
||||
|
||||
TERMS AND CONDITIONS FOR USE, REPRODUCTION, AND DISTRIBUTION
|
||||
|
||||
1. Definitions.
|
||||
|
||||
"License" shall mean the terms and conditions for use, reproduction,
|
||||
and distribution as defined by Sections 1 through 9 of this document.
|
||||
|
||||
"Licensor" shall mean the copyright owner or entity authorized by
|
||||
the copyright owner that is granting the License.
|
||||
|
||||
"Legal Entity" shall mean the union of the acting entity and all
|
||||
other entities that control, are controlled by, or are under common
|
||||
control with that entity. For the purposes of this definition,
|
||||
"control" means (i) the power, direct or indirect, to cause the
|
||||
direction or management of such entity, whether by contract or
|
||||
otherwise, or (ii) ownership of fifty percent (50%) or more of the
|
||||
outstanding shares, or (iii) beneficial ownership of such entity.
|
||||
|
||||
"You" (or "Your") shall mean an individual or Legal Entity
|
||||
exercising permissions granted by this License.
|
||||
|
||||
"Source" form shall mean the preferred form for making modifications,
|
||||
including but not limited to software source code, documentation
|
||||
source, and configuration files.
|
||||
|
||||
"Object" form shall mean any form resulting from mechanical
|
||||
transformation or translation of a Source form, including but
|
||||
not limited to compiled object code, generated documentation,
|
||||
and conversions to other media types.
|
||||
|
||||
"Work" shall mean the work of authorship, whether in Source or
|
||||
Object form, made available under the License, as indicated by a
|
||||
copyright notice that is included in or attached to the work
|
||||
(an example is provided in the Appendix below).
|
||||
|
||||
"Derivative Works" shall mean any work, whether in Source or Object
|
||||
form, that is based on (or derived from) the Work and for which the
|
||||
editorial revisions, annotations, elaborations, or other modifications
|
||||
represent, as a whole, an original work of authorship. For the purposes
|
||||
of this License, Derivative Works shall not include works that remain
|
||||
separable from, or merely link (or bind by name) to the interfaces of,
|
||||
the Work and Derivative Works thereof.
|
||||
|
||||
"Contribution" shall mean any work of authorship, including
|
||||
the original version of the Work and any modifications or additions
|
||||
to that Work or Derivative Works thereof, that is intentionally
|
||||
submitted to Licensor for inclusion in the Work by the copyright owner
|
||||
or by an individual or Legal Entity authorized to submit on behalf of
|
||||
the copyright owner. For the purposes of this definition, "submitted"
|
||||
means any form of electronic, verbal, or written communication sent
|
||||
to the Licensor or its representatives, including but not limited to
|
||||
communication on electronic mailing lists, source code control systems,
|
||||
and issue tracking systems that are managed by, or on behalf of, the
|
||||
Licensor for the purpose of discussing and improving the Work, but
|
||||
excluding communication that is conspicuously marked or otherwise
|
||||
designated in writing by the copyright owner as "Not a Contribution."
|
||||
|
||||
"Contributor" shall mean Licensor and any individual or Legal Entity
|
||||
on behalf of whom a Contribution has been received by Licensor and
|
||||
subsequently incorporated within the Work.
|
||||
|
||||
2. Grant of Copyright License. Subject to the terms and conditions of
|
||||
this License, each Contributor hereby grants to You a perpetual,
|
||||
worldwide, non-exclusive, no-charge, royalty-free, irrevocable
|
||||
copyright license to reproduce, prepare Derivative Works of,
|
||||
publicly display, publicly perform, sublicense, and distribute the
|
||||
Work and such Derivative Works in Source or Object form.
|
||||
|
||||
3. Grant of Patent License. Subject to the terms and conditions of
|
||||
this License, each Contributor hereby grants to You a perpetual,
|
||||
worldwide, non-exclusive, no-charge, royalty-free, irrevocable
|
||||
(except as stated in this section) patent license to make, have made,
|
||||
use, offer to sell, sell, import, and otherwise transfer the Work,
|
||||
where such license applies only to those patent claims licensable
|
||||
by such Contributor that are necessarily infringed by their
|
||||
Contribution(s) alone or by combination of their Contribution(s)
|
||||
with the Work to which such Contribution(s) was submitted. If You
|
||||
institute patent litigation against any entity (including a
|
||||
cross-claim or counterclaim in a lawsuit) alleging that the Work
|
||||
or a Contribution incorporated within the Work constitutes direct
|
||||
or contributory patent infringement, then any patent licenses
|
||||
granted to You under this License for that Work shall terminate
|
||||
as of the date such litigation is filed.
|
||||
|
||||
4. Redistribution. You may reproduce and distribute copies of the
|
||||
Work or Derivative Works thereof in any medium, with or without
|
||||
modifications, and in Source or Object form, provided that You
|
||||
meet the following conditions:
|
||||
|
||||
(a) You must give any other recipients of the Work or
|
||||
Derivative Works a copy of this License; and
|
||||
|
||||
(b) You must cause any modified files to carry prominent notices
|
||||
stating that You changed the files; and
|
||||
|
||||
(c) You must retain, in the Source form of any Derivative Works
|
||||
that You distribute, all copyright, patent, trademark, and
|
||||
attribution notices from the Source form of the Work,
|
||||
excluding those notices that do not pertain to any part of
|
||||
the Derivative Works; and
|
||||
|
||||
(d) If the Work includes a "NOTICE" text file as part of its
|
||||
distribution, then any Derivative Works that You distribute must
|
||||
include a readable copy of the attribution notices contained
|
||||
within such NOTICE file, excluding those notices that do not
|
||||
pertain to any part of the Derivative Works, in at least one
|
||||
of the following places: within a NOTICE text file distributed
|
||||
as part of the Derivative Works; within the Source form or
|
||||
documentation, if provided along with the Derivative Works; or,
|
||||
within a display generated by the Derivative Works, if and
|
||||
wherever such third-party notices normally appear. The contents
|
||||
of the NOTICE file are for informational purposes only and
|
||||
do not modify the License. You may add Your own attribution
|
||||
notices within Derivative Works that You distribute, alongside
|
||||
or as an addendum to the NOTICE text from the Work, provided
|
||||
that such additional attribution notices cannot be construed
|
||||
as modifying the License.
|
||||
|
||||
You may add Your own copyright statement to Your modifications and
|
||||
may provide additional or different license terms and conditions
|
||||
for use, reproduction, or distribution of Your modifications, or
|
||||
for any such Derivative Works as a whole, provided Your use,
|
||||
reproduction, and distribution of the Work otherwise complies with
|
||||
the conditions stated in this License.
|
||||
|
||||
5. Submission of Contributions. Unless You explicitly state otherwise,
|
||||
any Contribution intentionally submitted for inclusion in the Work
|
||||
by You to the Licensor shall be under the terms and conditions of
|
||||
this License, without any additional terms or conditions.
|
||||
Notwithstanding the above, nothing herein shall supersede or modify
|
||||
the terms of any separate license agreement you may have executed
|
||||
with Licensor regarding such Contributions.
|
||||
|
||||
6. Trademarks. This License does not grant permission to use the trade
|
||||
names, trademarks, service marks, or product names of the Licensor,
|
||||
except as required for reasonable and customary use in describing the
|
||||
origin of the Work and reproducing the content of the NOTICE file.
|
||||
|
||||
7. Disclaimer of Warranty. Unless required by applicable law or
|
||||
agreed to in writing, Licensor provides the Work (and each
|
||||
Contributor provides its Contributions) on an "AS IS" BASIS,
|
||||
WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or
|
||||
implied, including, without limitation, any warranties or conditions
|
||||
of TITLE, NON-INFRINGEMENT, MERCHANTABILITY, or FITNESS FOR A
|
||||
PARTICULAR PURPOSE. You are solely responsible for determining the
|
||||
appropriateness of using or redistributing the Work and assume any
|
||||
risks associated with Your exercise of permissions under this License.
|
||||
|
||||
8. Limitation of Liability. In no event and under no legal theory,
|
||||
whether in tort (including negligence), contract, or otherwise,
|
||||
unless required by applicable law (such as deliberate and grossly
|
||||
negligent acts) or agreed to in writing, shall any Contributor be
|
||||
liable to You for damages, including any direct, indirect, special,
|
||||
incidental, or consequential damages of any character arising as a
|
||||
result of this License or out of the use or inability to use the
|
||||
Work (including but not limited to damages for loss of goodwill,
|
||||
work stoppage, computer failure or malfunction, or any and all
|
||||
other commercial damages or losses), even if such Contributor
|
||||
has been advised of the possibility of such damages.
|
||||
|
||||
9. Accepting Warranty or Additional Liability. While redistributing
|
||||
the Work or Derivative Works thereof, You may choose to offer,
|
||||
and charge a fee for, acceptance of support, warranty, indemnity,
|
||||
or other liability obligations and/or rights consistent with this
|
||||
License. However, in accepting such obligations, You may act only
|
||||
on Your own behalf and on Your sole responsibility, not on behalf
|
||||
of any other Contributor, and only if You agree to indemnify,
|
||||
defend, and hold each Contributor harmless for any liability
|
||||
incurred by, or claims asserted against, such Contributor by reason
|
||||
of your accepting any such warranty or additional liability.
|
||||
|
||||
END OF TERMS AND CONDITIONS
|
||||
|
||||
APPENDIX: How to apply the Apache License to your work.
|
||||
|
||||
To apply the Apache License to your work, attach the following
|
||||
boilerplate notice, with the fields enclosed by brackets "[]"
|
||||
replaced with your own identifying information. (Don't include
|
||||
the brackets!) The text should be enclosed in the appropriate
|
||||
comment syntax for the file format. We also recommend that a
|
||||
file or class name and description of purpose be included on the
|
||||
same "printed page" as the copyright notice for easier
|
||||
identification within third-party archives.
|
||||
|
||||
Copyright [yyyy] [name of copyright owner]
|
||||
|
||||
Licensed under the Apache License, Version 2.0 (the "License");
|
||||
you may not use this file except in compliance with the License.
|
||||
You may obtain a copy of the License at
|
||||
|
||||
http://www.apache.org/licenses/LICENSE-2.0
|
||||
|
||||
Unless required by applicable law or agreed to in writing, software
|
||||
distributed under the License is distributed on an "AS IS" BASIS,
|
||||
WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
See the License for the specific language governing permissions and
|
||||
limitations under the License.
|
||||
@@ -0,0 +1,7 @@
|
||||
# The following lines of boilerplate have to be in your project's CMakeLists
|
||||
# in this exact order for cmake to work correctly
|
||||
cmake_minimum_required(VERSION 3.5)
|
||||
|
||||
set(EXTRA_COMPONENT_DIRS "$ENV{IDF_PATH}/tools/unit-test-app/components")
|
||||
include($ENV{IDF_PATH}/tools/cmake/project.cmake)
|
||||
project(adc_battery_estimation_test)
|
||||
@@ -0,0 +1,7 @@
|
||||
idf_component_register(
|
||||
SRC_DIRS "."
|
||||
INCLUDE_DIRS "."
|
||||
)
|
||||
|
||||
include(package_manager)
|
||||
cu_pkg_define_version(${CMAKE_CURRENT_LIST_DIR})
|
||||
@@ -0,0 +1,176 @@
|
||||
/*
|
||||
* SPDX-FileCopyrightText: 2025 Espressif Systems (Shanghai) CO LTD
|
||||
*
|
||||
* SPDX-License-Identifier: Apache-2.0
|
||||
*/
|
||||
#include <stdio.h>
|
||||
#include <string.h>
|
||||
#include "unity.h"
|
||||
#include "unity_config.h"
|
||||
#include "freertos/FreeRTOS.h"
|
||||
#include "freertos/task.h"
|
||||
#include "adc_battery_estimation.h"
|
||||
#include "driver/gpio.h"
|
||||
|
||||
#define TEST_MEMORY_LEAK_THRESHOLD (-460)
|
||||
#define TEST_ADC_UNIT (ADC_UNIT_1)
|
||||
#define TEST_ADC_BITWIDTH (ADC_BITWIDTH_DEFAULT)
|
||||
#define TEST_ADC_ATTEN (ADC_ATTEN_DB_12)
|
||||
#define TEST_ADC_CHANNEL (ADC_CHANNEL_1)
|
||||
#define TEST_CHARGE_GPIO_NUM (GPIO_NUM_0)
|
||||
#define TEST_RESISTOR_UPPER (460)
|
||||
#define TEST_RESISTOR_LOWER (460)
|
||||
#define TEST_ESTIMATION_TIME (100)
|
||||
|
||||
static size_t before_free_8bit;
|
||||
static size_t before_free_32bit;
|
||||
|
||||
bool battery_charging_detect(void *user_data)
|
||||
{
|
||||
if (gpio_get_level(TEST_CHARGE_GPIO_NUM) == 0) {
|
||||
return true;
|
||||
}
|
||||
return false;
|
||||
}
|
||||
|
||||
TEST_CASE("adc battery estimation test", "[internal adc]")
|
||||
{
|
||||
gpio_config_t io_conf = {
|
||||
.pin_bit_mask = (1ULL << TEST_CHARGE_GPIO_NUM),
|
||||
.mode = GPIO_MODE_INPUT,
|
||||
.pull_up_en = GPIO_PULLUP_ENABLE,
|
||||
.pull_down_en = GPIO_PULLDOWN_DISABLE,
|
||||
.intr_type = GPIO_INTR_DISABLE,
|
||||
};
|
||||
gpio_config(&io_conf);
|
||||
|
||||
adc_battery_estimation_t config = {
|
||||
.internal = {
|
||||
.adc_unit = TEST_ADC_UNIT,
|
||||
.adc_bitwidth = TEST_ADC_BITWIDTH,
|
||||
.adc_atten = TEST_ADC_ATTEN,
|
||||
},
|
||||
.adc_channel = TEST_ADC_CHANNEL,
|
||||
.lower_resistor = TEST_RESISTOR_LOWER,
|
||||
.upper_resistor = TEST_RESISTOR_UPPER,
|
||||
.charging_detect_cb = battery_charging_detect,
|
||||
.charging_detect_user_data = NULL,
|
||||
};
|
||||
|
||||
adc_battery_estimation_handle_t adc_battery_estimation_handle = adc_battery_estimation_create(&config);
|
||||
TEST_ASSERT(adc_battery_estimation_handle != NULL);
|
||||
|
||||
for (int i = 0; i < TEST_ESTIMATION_TIME; i++) {
|
||||
float capacity = 0;
|
||||
adc_battery_estimation_get_capacity(adc_battery_estimation_handle, &capacity);
|
||||
printf("Battery capacity: %.1f%%\n", capacity);
|
||||
vTaskDelay(pdMS_TO_TICKS(500));
|
||||
}
|
||||
|
||||
TEST_ESP_OK(adc_battery_estimation_destroy(adc_battery_estimation_handle));
|
||||
}
|
||||
|
||||
TEST_CASE("adc battery estimation test", "[external adc]")
|
||||
{
|
||||
adc_oneshot_unit_handle_t adc_handle;
|
||||
adc_cali_handle_t adc_cali_handle;
|
||||
|
||||
gpio_config_t io_conf = {
|
||||
.pin_bit_mask = (1ULL << TEST_CHARGE_GPIO_NUM),
|
||||
.mode = GPIO_MODE_INPUT,
|
||||
.pull_up_en = GPIO_PULLUP_ENABLE,
|
||||
.pull_down_en = GPIO_PULLDOWN_DISABLE,
|
||||
.intr_type = GPIO_INTR_DISABLE,
|
||||
};
|
||||
gpio_config(&io_conf);
|
||||
|
||||
adc_oneshot_unit_init_cfg_t init_cfg = {
|
||||
.unit_id = TEST_ADC_UNIT,
|
||||
};
|
||||
TEST_ESP_OK(adc_oneshot_new_unit(&init_cfg, &adc_handle));
|
||||
|
||||
adc_oneshot_chan_cfg_t chan_cfg = {
|
||||
.atten = TEST_ADC_ATTEN,
|
||||
.bitwidth = TEST_ADC_BITWIDTH,
|
||||
};
|
||||
TEST_ESP_OK(adc_oneshot_config_channel(adc_handle, TEST_ADC_CHANNEL, &chan_cfg));
|
||||
|
||||
#if ADC_CALI_SCHEME_CURVE_FITTING_SUPPORTED
|
||||
adc_cali_curve_fitting_config_t cali_config = {
|
||||
.unit_id = TEST_ADC_UNIT,
|
||||
.chan = TEST_ADC_CHANNEL,
|
||||
.atten = TEST_ADC_ATTEN,
|
||||
.bitwidth = TEST_ADC_BITWIDTH,
|
||||
};
|
||||
TEST_ESP_OK(adc_cali_create_scheme_curve_fitting(&cali_config, &adc_cali_handle));
|
||||
#elif ADC_CALI_SCHEME_LINE_FITTING_SUPPORTED
|
||||
adc_cali_line_fitting_config_t cali_config = {
|
||||
.unit_id = TEST_ADC_UNIT,
|
||||
.atten = TEST_ADC_ATTEN,
|
||||
.bitwidth = TEST_ADC_BITWIDTH,
|
||||
};
|
||||
TEST_ESP_OK(adc_cali_create_scheme_line_fitting(&cali_config, &adc_cali_handle));
|
||||
#endif
|
||||
|
||||
adc_battery_estimation_t config = {
|
||||
.external = {
|
||||
.adc_handle = adc_handle,
|
||||
.adc_cali_handle = adc_cali_handle,
|
||||
},
|
||||
.adc_channel = TEST_ADC_CHANNEL,
|
||||
.lower_resistor = TEST_RESISTOR_LOWER,
|
||||
.upper_resistor = TEST_RESISTOR_UPPER,
|
||||
.charging_detect_cb = battery_charging_detect,
|
||||
.charging_detect_user_data = NULL,
|
||||
};
|
||||
|
||||
adc_battery_estimation_handle_t adc_battery_estimation_handle = adc_battery_estimation_create(&config);
|
||||
TEST_ASSERT(adc_battery_estimation_handle != NULL);
|
||||
|
||||
for (int i = 0; i < TEST_ESTIMATION_TIME; i++) {
|
||||
float capacity = 0;
|
||||
adc_battery_estimation_get_capacity(adc_battery_estimation_handle, &capacity);
|
||||
printf("Battery capacity: %.1f%%\n", capacity);
|
||||
vTaskDelay(pdMS_TO_TICKS(500));
|
||||
}
|
||||
|
||||
TEST_ESP_OK(adc_battery_estimation_destroy(adc_battery_estimation_handle));
|
||||
|
||||
TEST_ESP_OK(adc_oneshot_del_unit(adc_handle));
|
||||
#if ADC_CALI_SCHEME_CURVE_FITTING_SUPPORTED
|
||||
TEST_ESP_OK(adc_cali_delete_scheme_curve_fitting(adc_cali_handle));
|
||||
#elif ADC_CALI_SCHEME_LINE_FITTING_SUPPORTED
|
||||
TEST_ESP_OK(adc_cali_delete_scheme_line_fitting(adc_cali_handle));
|
||||
#endif
|
||||
}
|
||||
|
||||
static void check_leak(size_t before_free, size_t after_free, const char *type)
|
||||
{
|
||||
ssize_t delta = after_free - before_free;
|
||||
printf("MALLOC_CAP_%s: Before %u bytes free, After %u bytes free (delta %d)\n", type, before_free, after_free, delta);
|
||||
TEST_ASSERT_MESSAGE(delta >= TEST_MEMORY_LEAK_THRESHOLD, "memory leak");
|
||||
}
|
||||
|
||||
void setUp(void)
|
||||
{
|
||||
before_free_8bit = heap_caps_get_free_size(MALLOC_CAP_8BIT);
|
||||
before_free_32bit = heap_caps_get_free_size(MALLOC_CAP_32BIT);
|
||||
}
|
||||
|
||||
void tearDown(void)
|
||||
{
|
||||
size_t after_free_8bit = heap_caps_get_free_size(MALLOC_CAP_8BIT);
|
||||
size_t after_free_32bit = heap_caps_get_free_size(MALLOC_CAP_32BIT);
|
||||
check_leak(before_free_8bit, after_free_8bit, "8BIT");
|
||||
check_leak(before_free_32bit, after_free_32bit, "32BIT");
|
||||
}
|
||||
|
||||
void app_main(void)
|
||||
{
|
||||
printf(" _ ____ ____ ____ _ _____ _ _ _ _ \n");
|
||||
printf(" / \\ | _ \\ / ___| | __ ) __ _| |_ | ____|___| |_(_)_ __ ___ __ _| |_(_) ___ _ __ \n");
|
||||
printf(" / _ \\ | | | | | | _ \\ / _` | __| | _| / __| __| | '_ ` _ \\ / _` | __| |/ _ \\| '_ \\ \n");
|
||||
printf(" / ___ \\| |_| | |___ | |_) | (_| | |_ | |___\\__ \\ |_| | | | | | | (_| | |_| | (_) | | | |\n");
|
||||
printf(" /_/ \\_\\____/ \\____| |____/ \\__,_|\\__| |_____|___/\\__|_|_| |_| |_|\\__,_|\\__|_|\\___/|_| |_|\n");
|
||||
unity_run_menu();
|
||||
}
|
||||
@@ -0,0 +1,5 @@
|
||||
dependencies:
|
||||
idf: ">=5.0"
|
||||
adc_battery_estimation:
|
||||
version: "*"
|
||||
override_path: "../../../adc_battery_estimation"
|
||||
@@ -0,0 +1,3 @@
|
||||
CONFIG_ESP_DEFAULT_CPU_FREQ_MHZ_240=y
|
||||
CONFIG_FREERTOS_HZ=1000
|
||||
CONFIG_ESP_TASK_WDT_EN=n
|
||||
Reference in New Issue
Block a user